En este trimestre hemos podido disfrutar de un magnífico Taller de Electrónica y Robótica, a cargo del alumnado del Grado en Ingeniería Electrónica Industrial de la Universidad de Granada gracias a su profesor Jorge (padre de nuestra compañera Xenia) que imparte la asignatura de Control Inteligente.

En la presentación inicial, nos aclararon lo que sí o no es un robot, nos han hablado de su autonomía y de su capacidad para tomar decisiones en función del entorno que le rodea y de las series de instrucciones que deben programarles (algoritmos) para poder ejecutar una acción.
Comenzamos a conocer nuevo vocabulario para entender las propuestas que nos traen, como que hay dos elementos importantes en un robot: sensores (cámara, temperatura, micrófono, sonido) y actuadores (para mover ruedas, por ejemplo). Algunas máquinas son solo controladores ya que no perciben lo que sucede en el entorno.
En diferentes espacios del colegio se han mostrado los distintos talleres de electrónica y robótica. Los miembros de la clase de sexto se han «especializado» en uno de los robots propuestos para luego transmitir sus conocimientos y experiencias vividas al resto del grupo y mostrar el funcionamiento del mismo.
Os iré mencionando y relatando los seis talleres que se llevaron a cabo y a los estudiantes que los desarrollaron. El alumnado de sexto os hace llegar su funcionamiento así:
- Piano (a cargo de Víctor y Marina).
Para montar el piano, debían usar una placa de prueba y Scratch para programar el sonido que queríamos oír al pulsar una gominola que hacía la función de teclado. Cada gominola estaba conectada a un cable hasta la placa.
Con Scratch podías grabar un sonido, quedaba recogido en el ordenador y se incorporaba a las piezas programadas con Scratch. Así modificábamos el sonido de nuestro teclado dulce. Este piano estaba relacionado con el siguiente robot.
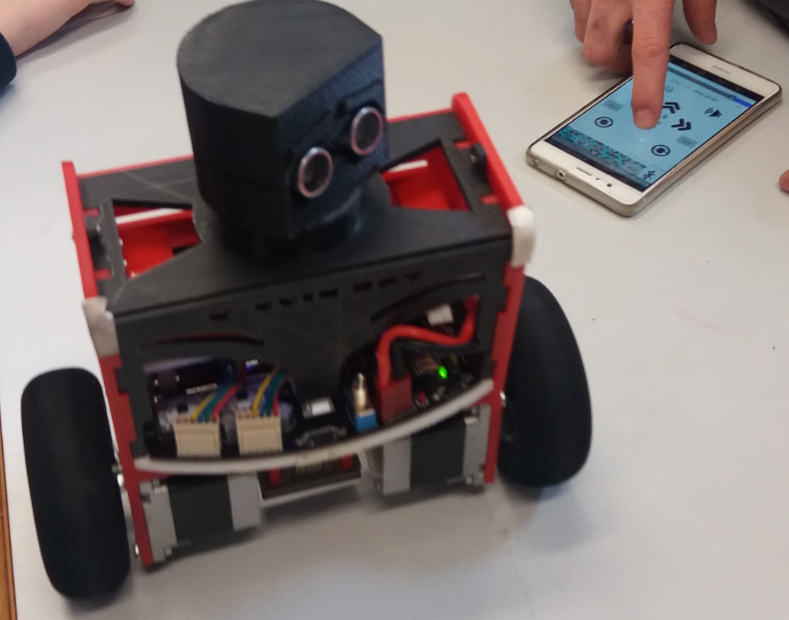
- Robot que recibe órdenes de voz (por Carlos y Juan).
Este coche funcionaba con cuatro motores, uno en cada rueda. A través de una app, conectada mediante Bluetooth, podíamos hacer que el coche se desplazara en cualquier dirección. Además, podíamos darle ordenes mediante voz, es decir, mediante la app y Bluetooth. Si le decíamos que avanzara hacia adelante, el coche ejecutaba la acción y se paraba cuando le decíamos ¡para! También se detenía si encontraba algún obstáculo en su camino gracias a un sensor que llevaba en la parte delantera. Ese sensor se puede programar para que detenga su movimiento ante un obstáculo a una cierta distancia.
- Separador de bolas y dibujo matricial (realizado por Miguel y José Antonio).
Este robot estaba compuesto por un almacén de bolas de colores y cuatro carriles de color por donde debía pasar una bola de un color determinado. Un sensor RGB identificaba el color de la bola seleccionada y con unos servomotores y una app móvil la conducía al carril de su mismo color hasta llegar a un depósito para clasificarlas. El mecanismo se manejaba con Arduino.
- Mano robótica (por Álvaro y Juan Carlos).
Esta máquina estaba formada por piezas hechas con una impresora 3D pero para dar una mayor sujeción a la unión de las piezas, usaban goma eva. También tenía unos cinco motores para que funcionasen los dedos, a su vez, cada motor estaba conectado a cinco hilos para moverlos. Tenía un zumbador que se utilizaba para jugar a piedra, papel o tijera, y podía contar hasta tres si tú lo programabas. Además contaba con unos sensores de flexión añadidos a los dedos de un guante que al ponértelo y hacer gestos, la mano robótica los imitaba.
Este robot programa con Scratch y puede ser de gran utilidad en la vida futura para funcionar como prótesis para personas.
- Semáforo con electrónica y programación (a cargo de Luis y Manuel).
Nos enseñaron a fabricar un semáforo que servía tanto para coches como para peatones. Nosotros los bautizamos como Taxillas y Latófono.
Taxillas: funcionaba y se programaba con una placa Protoboard de Arduino con muchos orificios que contienen carga positiva o negativa. Este semáforo servía tanto para peatones como para coches. Cambiaba de color según el tiempo que queríamos programar.
Latófono: funciona a través de una lata en la que cuando unos alambres tocan un metal y dependiendo del lugar, se encendían unas luces LED u otras para indicar que el semáforo estaba en verde, ámbar o rojo. Solo sirve para coches, y no para peatones.
- Robot que dibuja y evita obstáculos (organizado por Rosa y Pablo).
La base del robot estaba formada por el mecanismo de una aspiradora. Tenía tres sensores ultrasonidos para evitar obstáculos, y dos motores para desplazarse. El robot era circular, tenía cuatro ruedas y en el centro se le podía acoplar un rotulador. Se programaba a través de una aplicación web para dar la orden que quisiéramos. Uno de los objetivos era que el robot dibujara un cuadrado, por lo que debían darle las consignas de avanzar o girar los grados necesarios.
Parte de la mañana estuvimos aprendiendo, manipulando y programando los diferentes robots que nos han propuesto. Entender a programarlos, corregir errores de movimiento, conectarlos… han sido algunas de las misiones para entender la misión de cada uno de ellos. Valoramos de manera muy positiva estas iniciativas que plantean retos motivantes a nuestro alumnado, donde el trabajo en equipo es importante para construir aprendizaje y resolver cuestiones que se les vaya planteando.

Queda dar las gracias a Jorge y a su alumnado por el magnífico trabajo que han desarrollado en las aulas de la Facultad, y en este día en Alquería, compartiendo toda la mañana con nosotros. Ha sido una gran experiencia, a la que de algún modo daremos continuidad.
Saludos. Jorge